
 USTC
USTC Shanghai AI Laboratory
Shanghai AI LaboratoryI am currently an intern at the Shanghai Artificial Intelligence Laboratory, focusing on multi-agent systems, reinforcement learning, and LLM alignment. I am a Ph.D. student at the University of Science and Technology of China (USTC), advised by Prof. Wanli Ouyang and Prof. Lei Bai.
Research interests: machine learning, multimodal learning, AI agents, robotics.
Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
USTCPh.D. Student, advised by Prof. Wanli Ouyang and Prof. LEI BAISep. 2025 - present
Experience
-
Shanghai AI LaboratoryResearch Intern, advised by Prof. LEI BAIOct. 2024 - present
Honors & Awards
-
Beijing Merit Student2025
-
National Scholarship2023
Selected Publications (view all )
The landscape of agentic reinforcement learning for llms: A survey
Guibin Zhang*, Hejia Geng*, Xiaohang Yu*, Zhenfei Yin#, Zaibin Zhang, Zelin Tan, Heng Zhou, Zhongzhi Li, Xiangyuan Xue, Yijiang Li, Yifan Zhou, Yang Chen, Chen Zhang, Yutao Fan, Zihu Wang, Songtao Huang, Yue Liao, Hongru Wang, Mengyue Yang, Heng Ji, Michael Littman, Jun Wang, Shuicheng Yan, Philip Torr, Lei Bai# (* equal contribution, # corresponding author)
preprint
The landscape of agentic reinforcement learning for llms: A survey
Guibin Zhang*, Hejia Geng*, Xiaohang Yu*, Zhenfei Yin#, Zaibin Zhang, Zelin Tan, Heng Zhou, Zhongzhi Li, Xiangyuan Xue, Yijiang Li, Yifan Zhou, Yang Chen, Chen Zhang, Yutao Fan, Zihu Wang, Songtao Huang, Yue Liao, Hongru Wang, Mengyue Yang, Heng Ji, Michael Littman, Jun Wang, Shuicheng Yan, Philip Torr, Lei Bai# (* equal contribution, # corresponding author)
preprint
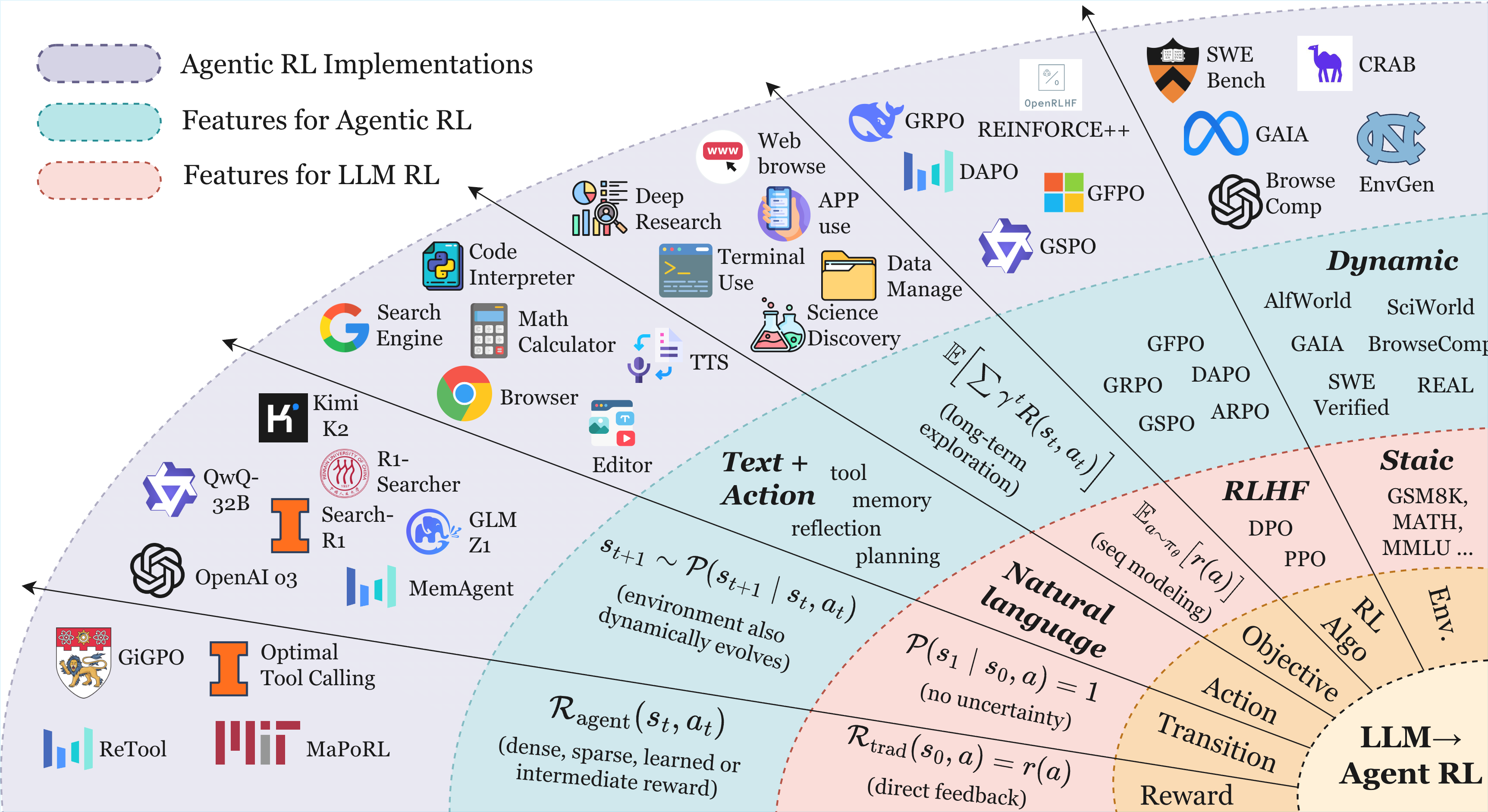
SSRL: Self-Search Reinforcement Learning
Yuchen Fan*, Kaiyan Zhang*, Heng Zhou*, Yuxin Zuo, Yanxu Chen, Yu Fu, Xinwei Long, Xuekai Zhu, Che Jiang, Yuchen Zhang, Li Kang, Gang Chen, Cheng Huang, Zhizhou He, Bingning Wang, Lei Bai#, Ning Ding#, Bowen Zhou# (* equal contribution, # corresponding author)
Under review.
SSRL: Self-Search Reinforcement Learning
Yuchen Fan*, Kaiyan Zhang*, Heng Zhou*, Yuxin Zuo, Yanxu Chen, Yu Fu, Xinwei Long, Xuekai Zhu, Che Jiang, Yuchen Zhang, Li Kang, Gang Chen, Cheng Huang, Zhizhou He, Bingning Wang, Lei Bai#, Ning Ding#, Bowen Zhou# (* equal contribution, # corresponding author)
Under review.
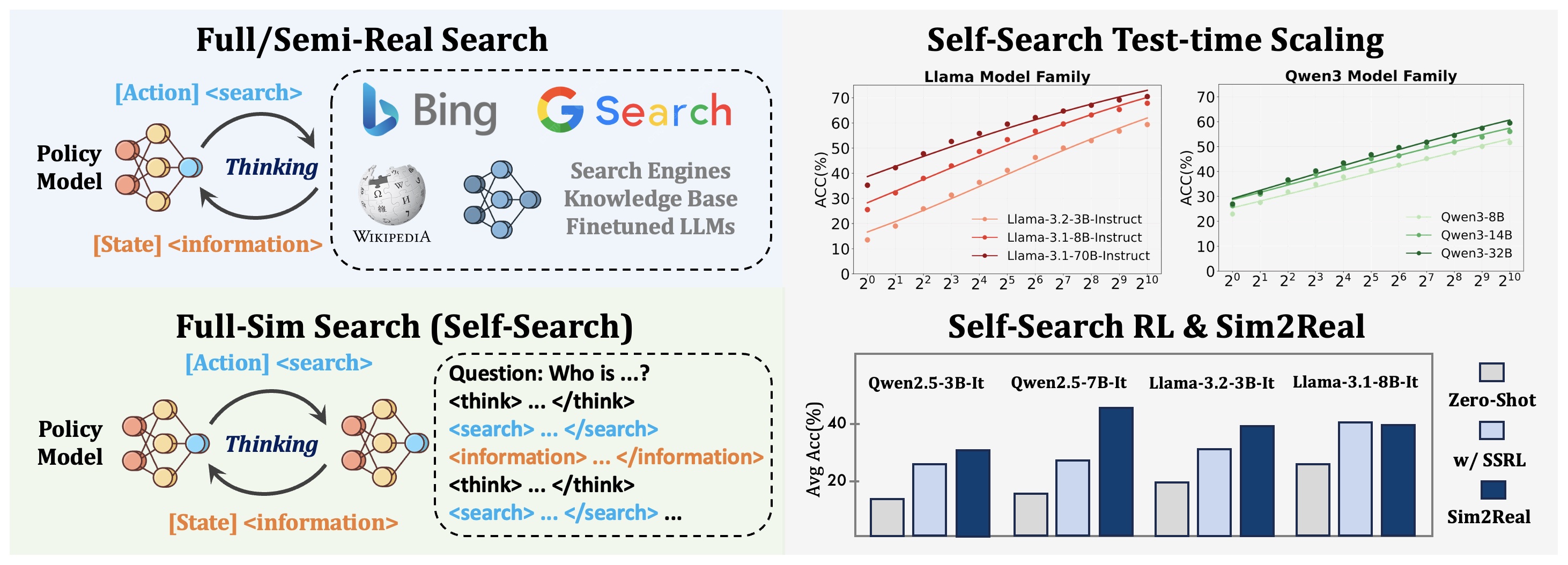
VIKI-R: Coordinating Embodied Multi-Agent Cooperation via Reinforcement Learning
Li Kang*, Xiufeng Song*, Heng Zhou*, Yiran Qin#, Jie Yang, Xiaohong Liu, Philip Torr, Lei Bai#, Zhenfei Yin# (* equal contribution, # corresponding author)
Annual Conference on Neural Information Processing Systems (NeurIPS) 2025
VIKI-R: Coordinating Embodied Multi-Agent Cooperation via Reinforcement Learning
Li Kang*, Xiufeng Song*, Heng Zhou*, Yiran Qin#, Jie Yang, Xiaohong Liu, Philip Torr, Lei Bai#, Zhenfei Yin# (* equal contribution, # corresponding author)
Annual Conference on Neural Information Processing Systems (NeurIPS) 2025
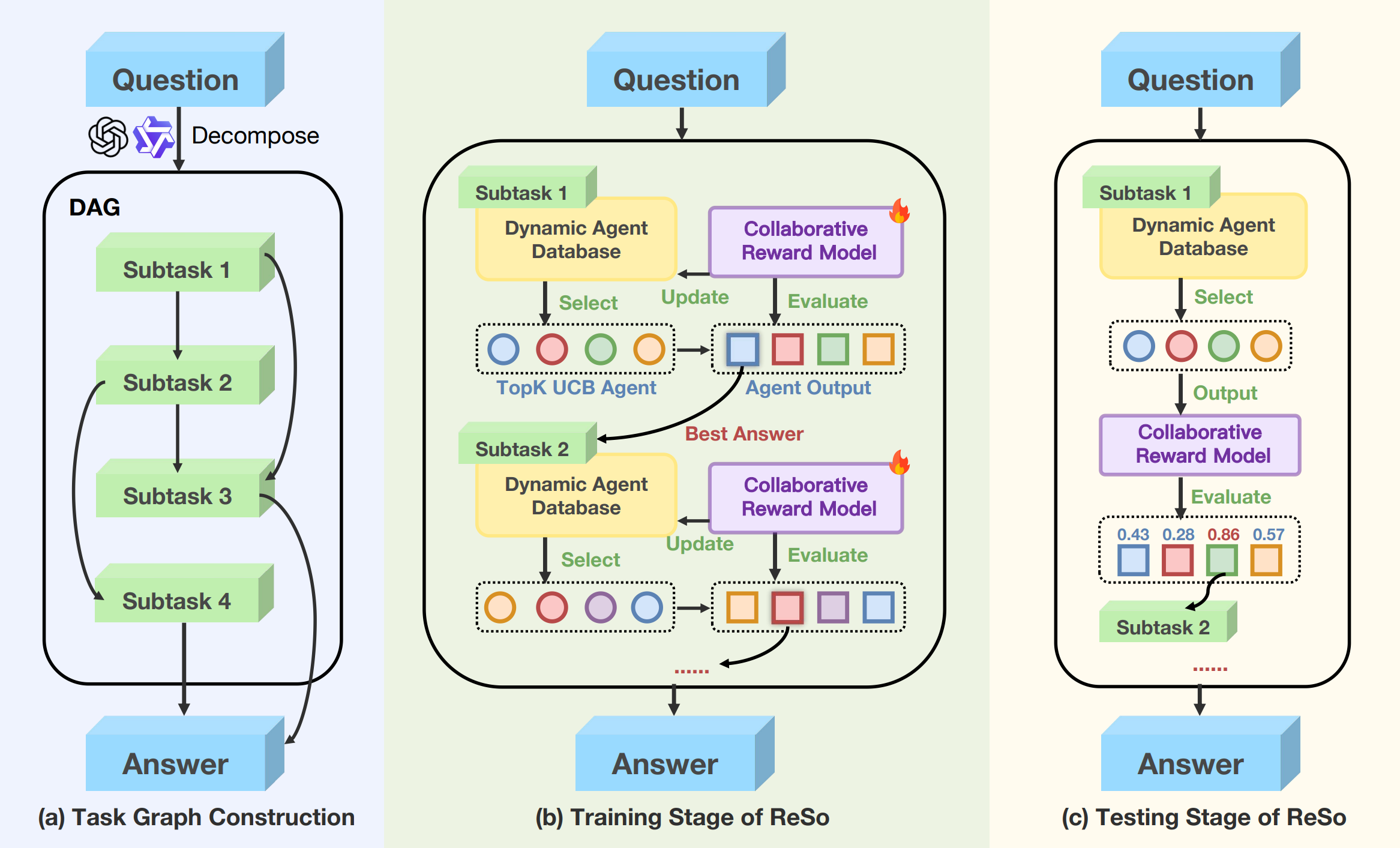
ReSo: A Reward-driven Self-organizing LLM-based Multi-Agent System for Reasoning Tasks
Heng Zhou*, Hejia Geng*, Xiangyuan Xue, Li Kang, Yiran Qin, Zhiyong Wang, Zhenfei Yin#, Lei Bai# (* equal contribution, # corresponding author)
EMNLP 2025 main Oral paper, SAC Highlight Award, (Top 1%)
ReSo: A Reward-driven Self-organizing LLM-based Multi-Agent System for Reasoning Tasks
Heng Zhou*, Hejia Geng*, Xiangyuan Xue, Li Kang, Yiran Qin, Zhiyong Wang, Zhenfei Yin#, Lei Bai# (* equal contribution, # corresponding author)
EMNLP 2025 main Oral paper, SAC Highlight Award, (Top 1%)