
KITTI
time
2011
sensor
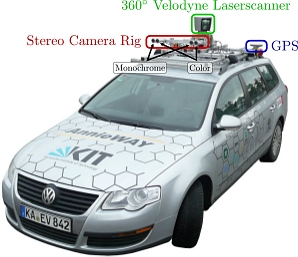
- Raw (unsynced+unrectified) and processed (synced+rectified) grayscale stereo sequences (0.5 Megapixels, stored in png format)
- Raw (unsynced+unrectified) and processed (synced+rectified) color stereo sequences (0.5 Megapixels, stored in png format)
- 3D Velodyne point clouds (100k points per frame, stored as binary float matrix)
- 3D GPS/IMU data (location, speed, acceleration, meta information, stored as text file)
- Calibration (Camera, Camera-to-GPS/IMU, Camera-to-Velodyne, stored as text file)
- 3D object tracklet labels (cars, trucks, trams, pedestrians, cyclists, stored as xml file)
Waymo
paper
time
2019
sensor
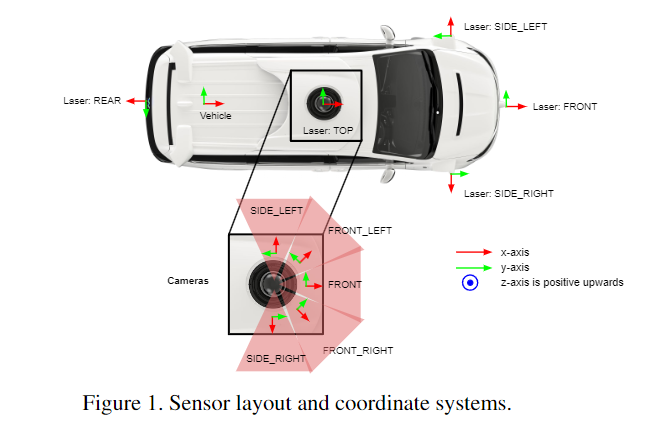
five LiDAR sensors and five high-resolution pinhole cameras
nusense
time
2019
sensor
6个相机、一个LiDAR、5个RADAR。相比KITTI和Waymo,nuScenes提供了360度的相机视野,所以该数据集可以用来做360度场景的多传感器融合。
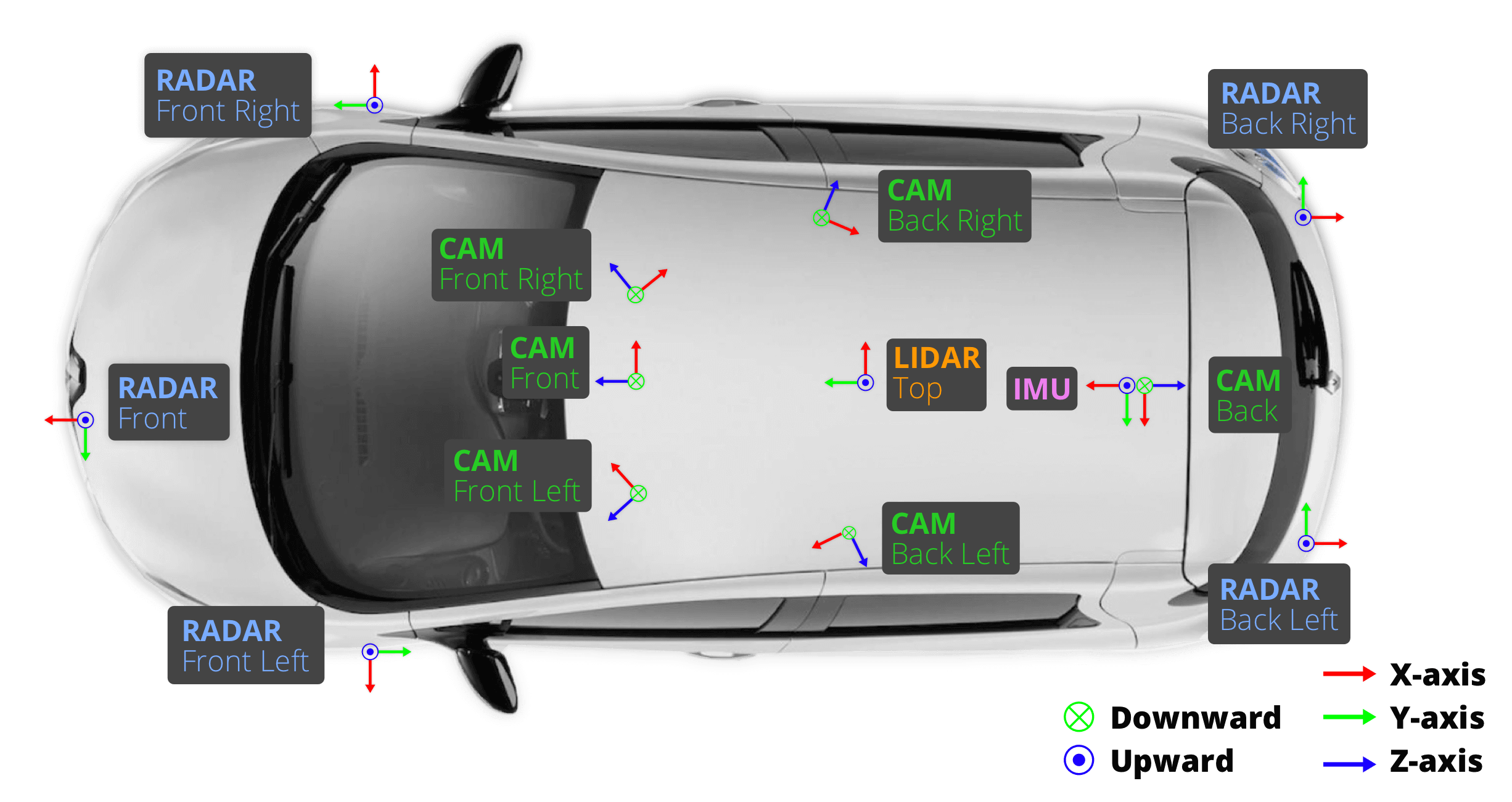
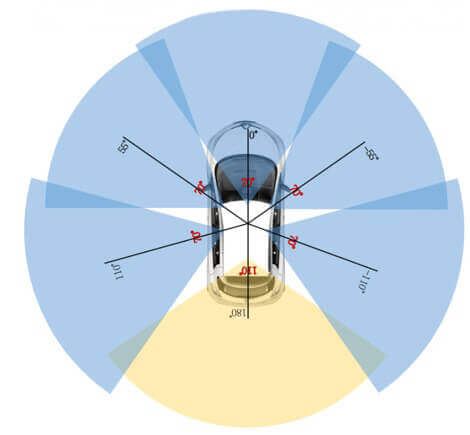
6个相机的分辨率都是1600x900,除了背后的相机FOV为110度,其他的5个相机的FOV为70度,前置相机和侧面的相机的视野中线角度为55度。也就是说相机覆盖了360度,但是会有重叠部分。相机的采集速率是12Hz。
用了一个32线的LiDAR。采集速率是20Hz
Mai dataset
├── bags |
bags 为点云文件,应该是ground truth
poses为相机的ground truth
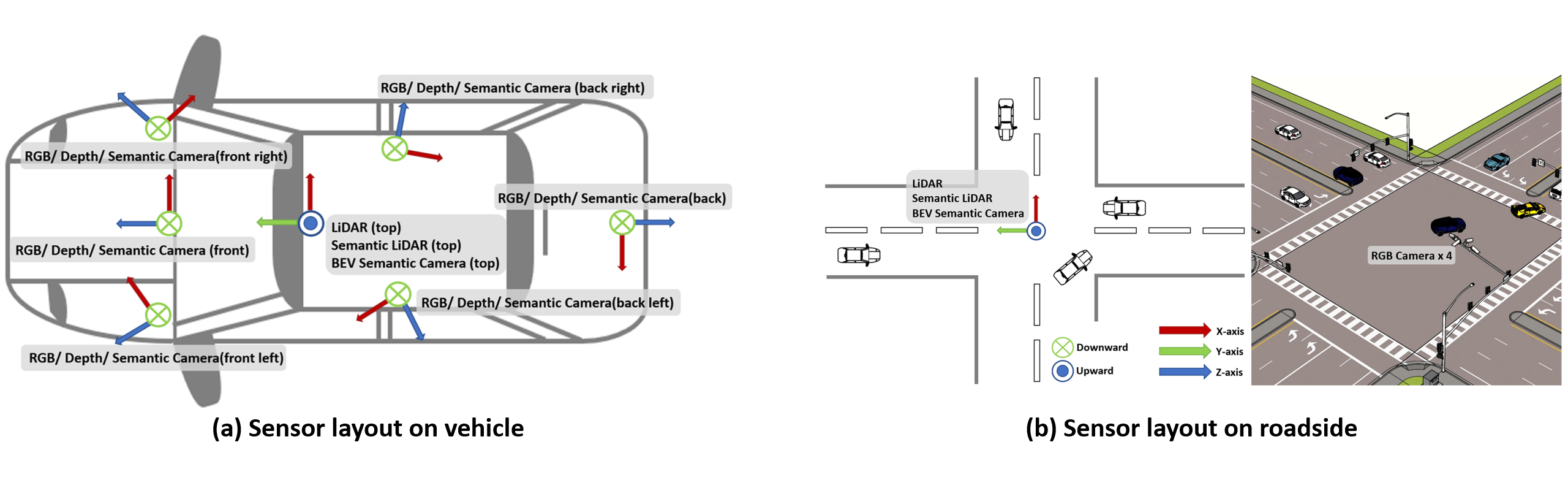
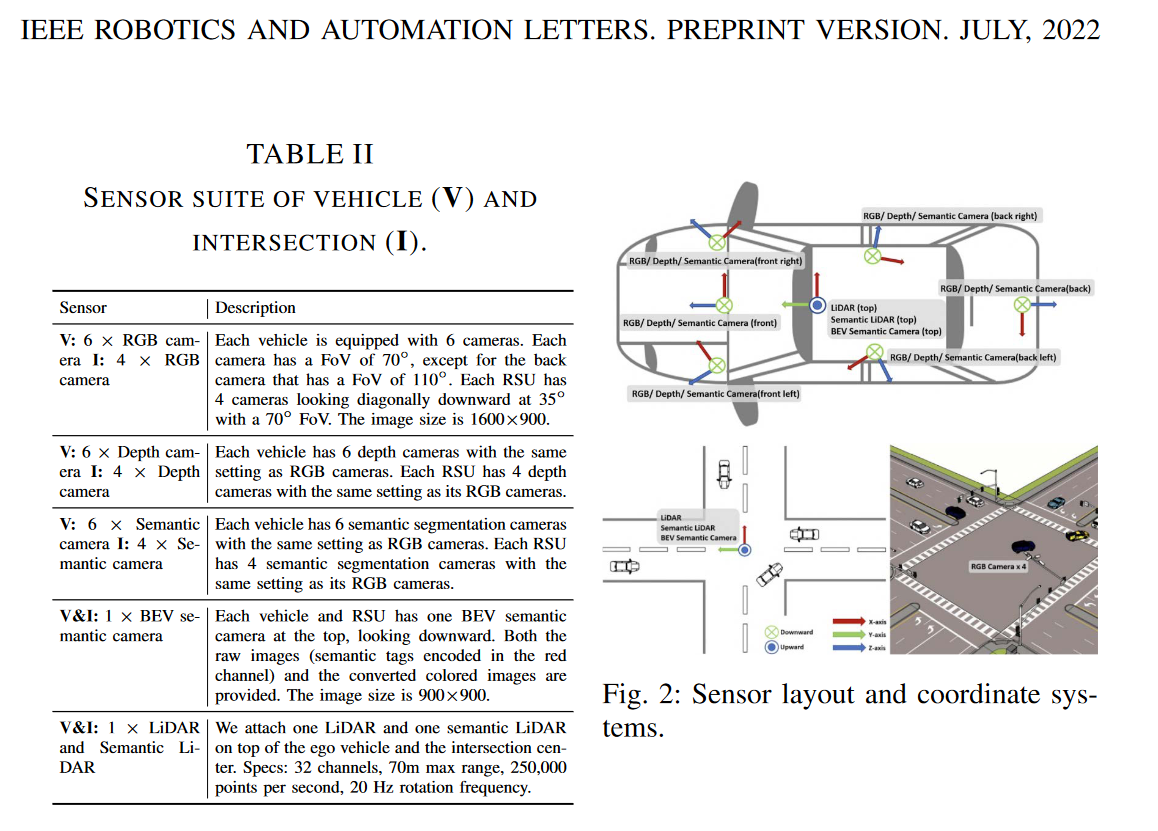
V2X-SIM
https://ai4ce.github.io/V2X-Sim/
时间
2022
V2X-Sim: vehicle-to-everything simulation 第一个合成的V2X辅助自动驾驶协同感知数据集
数据介绍
车辆的 左前,右前,正前,右后,左后,正后 安装RGB/depth/semantic 传感器
车的顶部 LiDAR、Semantic LiDAR、BEV Semantic Camera
车上还有IMU和GNSS传感器
在道路:放置4个RBG 1个LiDAR、Semantic LiDAR、BEV Semantic
map
town3、4、5
Newer College
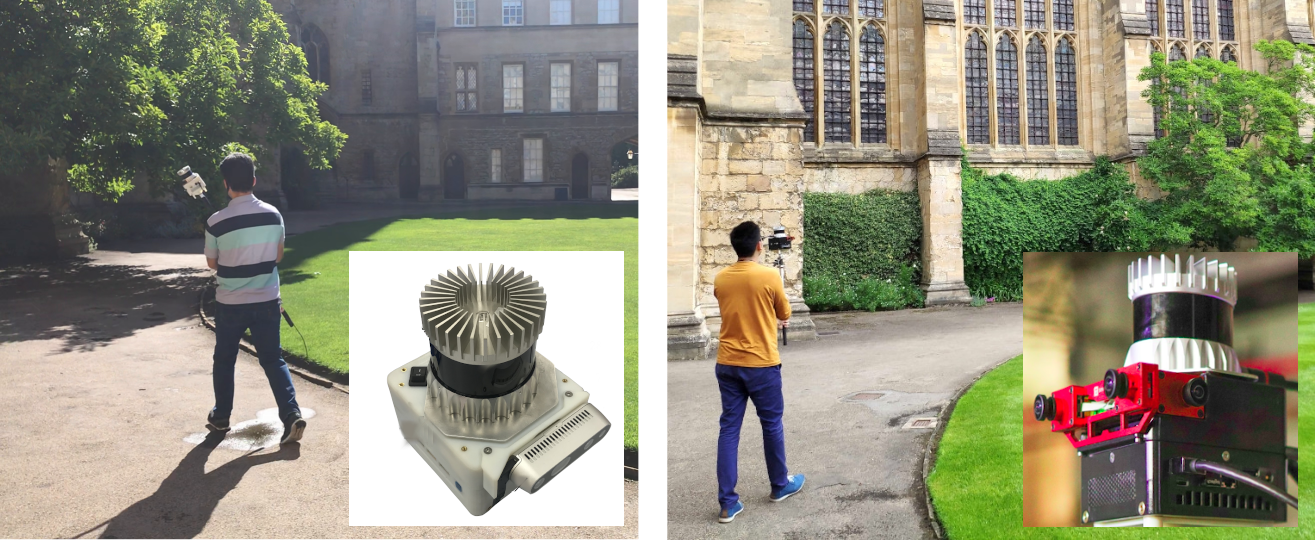
a variety of mobile mapping sensors handcarried at typical walking speeds through New College, Oxford for nearly 6.7 km. The dataset uses two different devices made up of commercially available sensors. These datasets contain some challenging sequences such as fast motion, aggressive shaking, rapid lighting change, and textureless surface.
Stereo Vision Lidar IMU dataset (Original, March 2020):
- Intel Realsense D435i - a stereoscopic-inertial camera
- Ouster OS-1 (Gen 1) 64 - a 64 multi-beam 3D LiDAR also with an IMU
Multicam Vision Lidar IMU dataset (Extension, December 2021):
- Sevensense Alphasense Core - a 4-camera visual inertial camera
- Ouster OS-0 128 - a 128 multi-beam 3D LiDAR also with an IMU
Both datasets are paired with precise centimetre accurate ground truth for the motion of the sensor rig.