
carla获取坐标
在用carla仿真平台收集数据时,例如:收集一个街道的RGB数据
我们在车上装载了RGB传感器,但得知道开始的坐标,这样才可以让车出生在坐标处,开始收集数据,但是,世界非常的大,系统貌似没有给出确定点坐标的直接方法,我的方法如下:
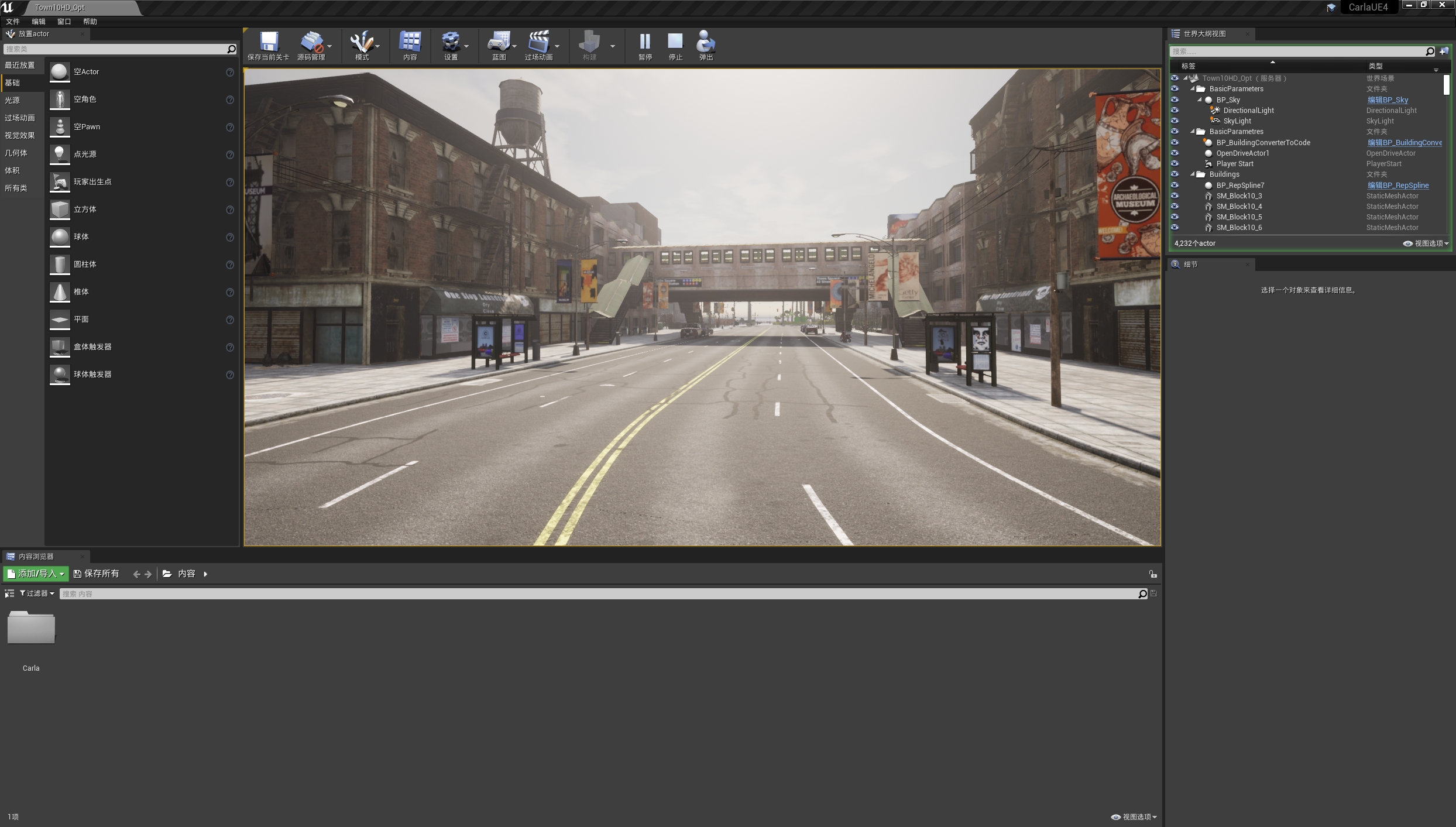
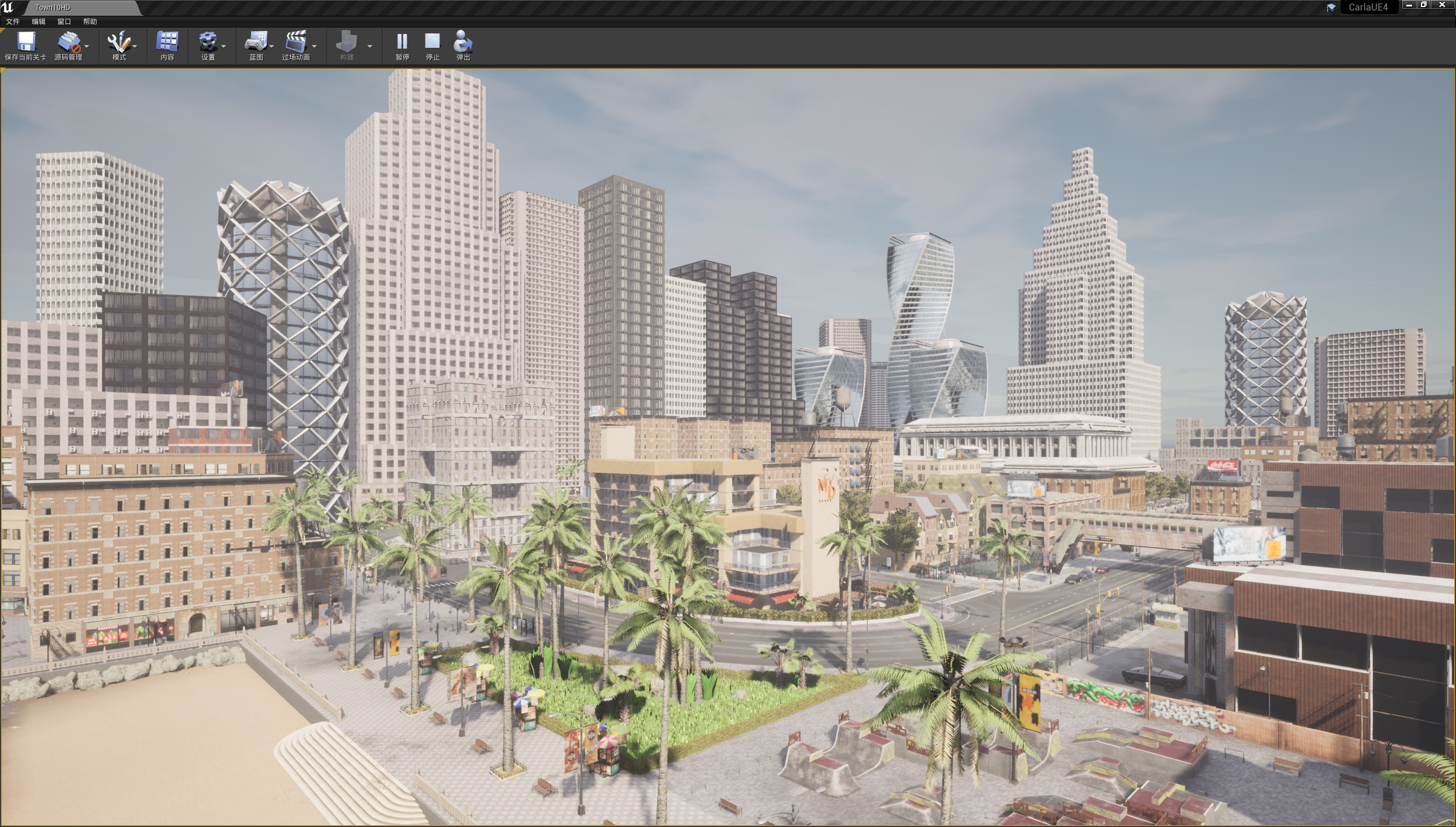
确定好town,和道路
可以提前浏览一下carla所提供的地图,选择一个town,和准备采集数据的道路,下图是我选择的街道
运行manual_control.py
carla在PythonAPI中提供的一个example,可以人为的操作车辆。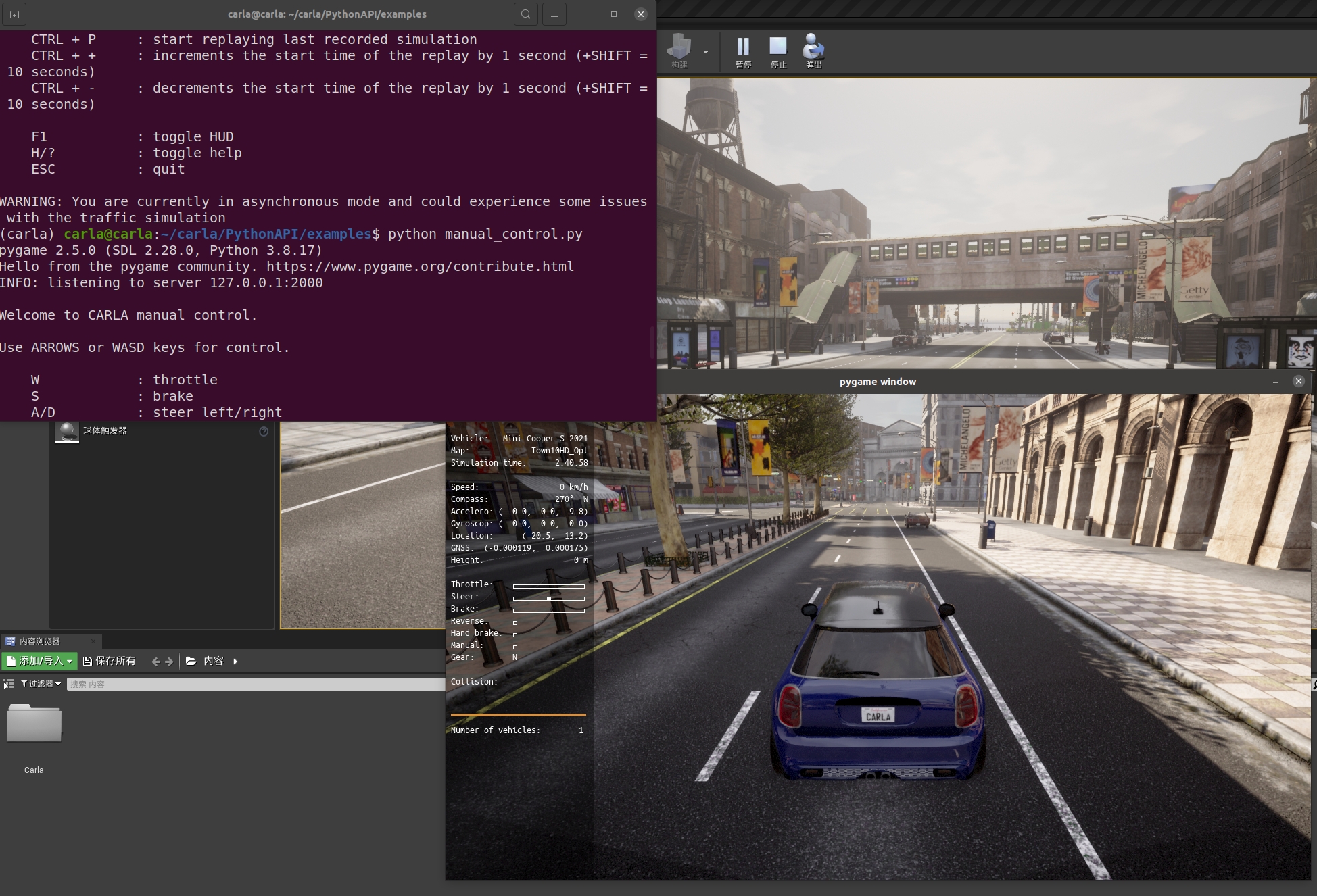
然后像玩gta5那样把车开到,之前选定的地方,到差不多的地方,可以按下“P”开启自动驾驶,从而调整车的角度,使其不偏离方向。

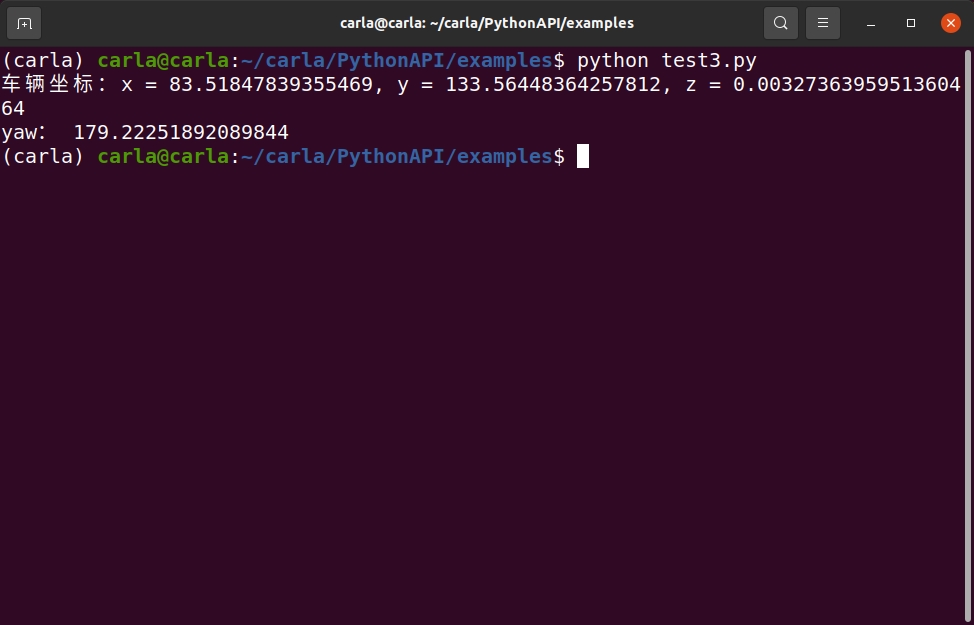
执行如下的.py,打印坐标
import carla |
总结
可能有更好的办法,只是作为一个carla入门几天的同学捣鼓出来的,有更好的方法欢迎与我沟通。
文章作者: Henggg
版权声明: 本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Henggg's Blog!
相关推荐
评论